

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Конструирование узлов машин Ti=Ta - врашающий момент на валу ведущей цвтранынж шестерни, Н*м; - число сателлитов; -коэффиш1ент ширины венца колеса: vfca **,4 при твердости колес НЪЪИ НВ; Vta = 0,315 при И<. SOHRQ; 4/, = 0,25 при Я>50 HRC,. Ширина bt центрального колеса Ы Ьь = ЩаО Ширину bg венца сателлита принимают на 2.-4 мм больше значения bt, а ширину *о центральной шестерни Модуль зацепления т = laJis: + zd- Полученный расчетом модуль округляют до ближайшего ставдартного значения, а затем уточняют межосевое расстояние а= m(Zg+zS)/2. Расчет на изгиб выполняют по формуле для обычных зубчатых передач. Если при силовом расчете передач по схеме рис. 14.1, еприняты разные модули для передач внешнего {Zt,-Zg) и внутреннего (z/-Zh) зацеплший, то усаовие соосности такой передачи + Zg)m Jcosaa = (Zt-mt/cosab- Откуда с Я1д / COSaa COia. Здесь число зубьев = cz/-. Иноща, для выполнения условия соосности, удобно одну передачу вьшолнить косозубой. Условие соосности в этом случае (t, + ТтЛсаф созая) = (Zb-zfimt/coi, Из этого условия вычисляют требуемый угол р наклона зуба. Межосевое расстоЯ1ше передачи, выполненной по любой схеме, с* = + %)mocosa/(2cospcosao). Для всех схем планетарных передач, чтобы зубья сателлитов не задевали друг за друга, производят проверку условия соседства по формуле c(V K)>0,5rf где dgg -диаметр вершин зубьев сателлита. После выполнения расчетов приступают к составлению эскизного проекта редуктора. Олределяют предварительные размеры валов, расстояния между деталями, реакции опор и намечают типы и размеры подшипников. Подщипники качения принимают: для опор центральных валов-шариковые радиальные легкой серии, для опор сателлитов-шариковые или роликовые сферические средней серии.  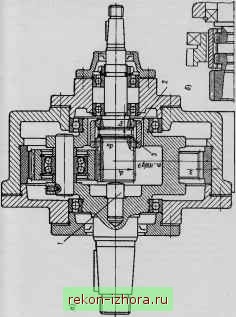 Дня расчета лодшшшиков качения находят реакции и опор. Основные расчетаые схемы предстаатены на рис. 14.3. Входной и выжщнсй валы передачи нагружены силой F, действующей со стороны зацепления, и конссшнкж силой (от муфты, ременной или цепной педачи). Значения F принимают по рекотлендациям гл. 7 (с. 102). Назначенные подщипники качения рассчитывают на заданный ресурс по действующей на опору реакции (Tvi или F. Учитьшая наибольщую возможную неравномерность распределения общего момента по потокам, силу F (Д). действующую на вал со стороны зубчатого зацепляшя, определяют по формулам: для входного вала (схема рис. 14.3, а) F= 0,2-10Г,М, где Г] -вращающий момент на валу, Н м; d\ -делительный диаметр зубьев чатой муфты (см. рис. 14.4), мм; для выходного вача (схемы на рис. 14.3, б, в, а также рис. 14.4 и 14.11, а) F= 0.1 ЮГй/йц, где Ti - момент на вызкщном валу (Bojwne), Н-м; 7*= Tiaij; - межосевое расстояние передачи, мм. Наиболее нагружены подшипники сателлитов: где iVmax - окружная сила, Н: i, -2-1 OA rin,(Mi)- Здесь 7ima(= 7i -максимальный из длительно действующих (номинальный) вращающий момент на ведущей шествие, Н-м; d\ -ДЕЛИтепышй диаметр ведущей шестерни, мм. ЭквиваЛЕНГная радиальная сила для расчета подшташика при топовом переменном режиме нагружения где Ке - коэффициент эквивалентности (см. гл. 7, с. 108). Требуемую радиальную динамическую грузоподьемность подшипников сателлитов вычисляют по формуле где Pf = VFKj - эквивалентная радиальная нагрузка, Н, К= 1,2 (относительно радиалыюй нагрузки вращается наружное кольцо); -требуемый ресурс подщипника при заданной надежносги, ч; nj = (Ид-п) и - относительная частота вращения и число зубьев центральной ведущей шестерни; %-число зубьев сателлита; щ-Коэффициент надежности (см. раздел 7.2); Огз-коэффициент условий применения (см. раздел 7.2: для шарикоподшипников сферических двухрядных = 0,5...0,6, для роликоподшипников сферических двухрядных = 0,3...0,4); А = 3 - дм шариковых и Л = 3,33 -для роликовых подшипнике 14.3. КОНСТРУИРОВАНИЕ ПЛАНЕТАРНЫХ ПЕРВДАЧ На рис. 14.4 приведена конструкция планетарного редуктора, выполненного по схеме рис. 14.1, о. При изготовлении деталей возникаютпогрешности, которые приводят к неравномерному нагружению потоков. Для компшсации этих пог-
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |