

|
|
Разделы сайта
Читаемое
Обновления Jul-2025
|
Промышленность Ижоры --> Станки механосборочного производства где Qj - поток, проходящий через дроссель, = М 5др, р-(Ра-Рб); здесь - коэффициент расхода; 5дршах - проходное сечение дросселя; е - параметр регулирования, равный отношению текущего значения открытия дросселя к наибольшему; р - плотность жидкости; ра, Рб - давление жидкости до дросселя Рис. 15.15. Статические характеристики дроссельного регулирования на входе и выходе 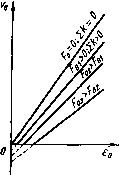 Рис. 15.16. Статические характеристики при дроссельном регулировании в параллель 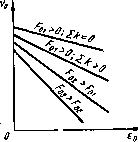 И после него; = кц -\- ka - суммарный коэффициент утечек в цилиндре кц и аппаратуре ка; W, - объемы рабочих полостей и объемы подключенных до дросселя линий. Если из уравнений сил и потока получить установившуюся скорость движения силового поршня, то при = и пренебрежении 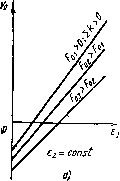 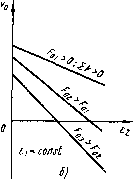 Рис. 15.17. Статические характеристики при дрос-сельно-дифференциальном регулировании при постоянном открытии дросселя Дг (а) или дросселя Д, (б): Л, н Дг - см. рис, 15.14 силами трения характер изменения скорости установившегося движения прн дроссельном регулировании на входе будет таким же, как и при регулировании на выходе (рис. 15.15). С точки зрения статических характеристик оба включения дросселей равноценны. Однако, если нагрузка меняет свой знак, то предпочтение следует отдать дроссельному регулированию на выходе. Так как растворенный в минеральном масле воздух оказывает большое влияние на динамические характеристики системы при небольших давлениях, желательно не допускать давление в рабочих полостях ниже 0,5 МПа. 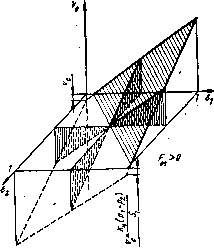 Рис. 15.18. Изменение скорости движения поршия дифференциального цилиндра при постоянной нагрузке в зависимости от изменения проходных сечений дросселей Mi и При регулировании скорости движения с помощью дросселей, включенных на входе и выходе гидравлических исполнительных органов, потребляемая системой мощность наибольшая, поэтому независимо от нагрузки насос работает при наибольшем давлении. Характер изменения скорости движения в установившемся режиме при регулировании дросселем, включенным параллельно исполнительному органу, показан на рис. 15.16. Потребляемая системой мощность в этом случае зависит от нагрузки, так как давление в напорной полости насоса также зависит от нагрузки. Дроссельно-дифференциальное регулирование скорости позволяет изменить скорость движения исполнительного органа как по величине, так и направлению. На рис. 15.17, а показан характер изменения скорости движения с помощью дросселя Дх (см. рис. 15.14) при постоянном открытии дросселя Да- За счет величины открытия дросселя Д1 можно обеспечить перемещение штока дифференциального цилиндра как в одном, так и в другом направлении. При увеличении нагрузки скорость движения уменьшается. Изменение скорости движения штока этого цилиндра можно получить и за счет изменения проходного сечения дросселя Да при постоянном открытии дросселя (рис. 15.17, б). При этом увеличение нагрузки способствует уменьшению скорости Vq. Скорость движения поршня дифференциального цилиндра при некоторой постоянной нагрузке изменяется в зависимости от изменения параметров регулирования обоих дросселей (рис. 15.18). Потребляемая мощность при дроссельно-дифференциальном регулировании скорости не зависит от нагрузки и так же, как при дроссельном регулировании, на входе и выходе наибольшая. § 7. РАСЧЕТ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ СТАНКА Исходя из функционального назначения каждого исполнительного органа станка, необходимо прежде всего определить полезную нагрузку, которую должен преодолеть проектируемый привод, и желаемый закон преодоления этой нагрузки, т. е. исходными условиями для расчета гидравлической системы являются статические, динамические и,прочие нагрузки, а также величина пере- мещения в функции времени, либо изменение скорости или ускорения во времени и т. п. Выбор гидравлического исполнительного органа (мотора, силового цилиндра) в зависимости от нагрузки и требуемого закона работы исполнительного органа станка показан на примере привода механизма автоматической смены инструмента. После выбора для каждого механизма станка гидравлических исполнительных органов (гидромоторов, силовых цилиндров) и их структуры систем управления для обеспечения требуемого закона перемещения этих органов 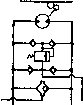  Рис. 15.19. Принципиальная гидравлическая схема приводов исполнительных! органов станка становятся известными не только геометрические параметры гидравлических исполнительных органов (рабочий объем моторов, диаметры цилиндров и штоков, длина хода и т. п.), но и компоновка механизмов станка и объекта в целом. Поэтому ориентировочно можно оценить протяженность гидравлических линий до каждого гидромотора или силового гидроцилиндра и наметить местные сопротивления в линиях (места включения аппаратуры, изменения направления линий и т. д.). На этом этапе имеется возможность уточнить силы сопротивления не только за счет сил трения в механической части устройства станка, но и в уплотнениях гидравлических органов, а также потери в гидравлических линиях из-за включения аппаратуры, местных сопротивлений и потери на трение по длине линии. На рис. 15.19 представлены гидравлические исполнительные органы со схемами систем управления и графиками предельных изменений во времени нагрузочных характеристик. Ниже приведен порядок предварительного расчета гидравлической системы станка, 1. Определение полезного перепада давления в полостях каждого гидравлического исполнительного органа: а) для силовых гидроцилиндров А /max где Арпол = Pi- Pi - ДЛЯ простых цилиндров; Дрпол = Рх - - Рг -для диф(} еренциальных цилиндров; здесь Pi Рг - Давлениесоответственно в напорной и силовой полостях цилиндра; 5 и 5 рабочие площади поршня в напорной и силовой полостях цилиндра; Fmax - наибольшая возможная нагрузка на штоке цилиндра; б) для моментного гидроцилиндра . вртах АРиол = ь (R - r)z где /Ивршах - наибольший вращающий момент на валу; 6 - ширина лопатки; R и г - радиусы статора и ротора; z - число рабочих камер; в) для гидромотора Арпол = 2яЛ1 вр max где Vj, - наибольший рабочий объем мотора. 2. Определение полезного расхода рабочей среды в полости каждого гидравлического исполнительного органа: а) для силовых гидроцилиндров возвратно-поступательного движения Рпол - Simaxi где Umax - наибольшая скорость движения . поршня силового цилиндра; 5, - рабочая площадь в напорной полости цилиндра; б) для моментного гидроцилиндра где а - угол поворота вала моментного цилиндра за время i; в) для гидромотора Qnon - мшах где Птах - наибольшая частота вращения выходного вала гидромотора. 3. Оценка потерь давления в сливной и напорной линиях каждого гидравлического исполнительного органа: Арс = АРтр. с + АРм. с + ДРап. с; Ар = Артр. н 4- АРм. н + Арап. п, где Арс, .Арн - суммарные потери в сливной и напорной линиях, связывающих насосную станцию с рассматриваемым мотором или цилиндром; Артр, Арм. Арап - потери давления от преодоления сил трения, местных сопротивлений и аппаратуры в соответствующих линиях. Потери давления на преодоление трения по длине трубопровода зависят от характера потока, длины и диаметра трубопровода, а также скорости потока. Желательно, чтобы средняя скорость потока не превышала во всасывающих линиях 1,2 м/с; в сливных 2 м/с; в напорных 3-5 м/с при давлении 2,5-10 МПа и 8-10 м/с при давлении свыше 15 МПа. Внутренний диаметр d трубопровода определяют в зависимости от выбранной средней скорости v и величины потока Q: d2/Q/nv. Потеря давления, затрачиваемого на преодоление сил трения по длине трубопровода, где L, d - длина и диаметр трубопровода; X - коэффициент сопротивления трению; при ламинарном потоке в металлических трубах X = (64-75)/Re, в резиновых шлангах X = (75-f-85)/Re, при турбулентном потоке X = 0,316Re-o-2S; здеь Re - число Рейнольдса, равное AQNn (П - периметр сечения трубы; v - кинематическая вязкость жидкости). Потеря давления, затрачиваемого на преодоление местных сопротивлений, выражается через суммарный коэффициент местных сопротивлений от скоростного напора: где 2]S - суммарный коэффициент местных потерь. Коэффициенты местных потерь для минеральных масел и воды считают одинаковыми и значения их берут из справочников. Потеря давления при прохождении жидкости через аппаратуру берется из каталогов на аппаратуру. Ориентировочно можно принимать следующие величины потери давления при прохождении жидкости: обратных клапанов 0,05 МПа; фильтров 0,05-0,15 МПа; теплообменников 0,15-0,2 МПа; клапанов постоянной разности давления 0,25-0,8 МПа; реверсивных распределителей 0,3 МПа, 4. Определение наибольшего давления, которое необходимо создать на входе системы управления каждого гидравлического исполнительного органа; а) для простых цилиндров, моторов, моментных цилиндров Рраб = Рм + Рпол + Арс; б) ДЛЯ дифференциальных цилиндро! Рраб - Ар -f Арпол + Арс Если предполагается применить один источник энергии, то из найденных значений наибольших рабочих давлений выбирают мак- симальное, по которому настраивают предохранительный клапан с некоторым запасом: Ркл = Ррабтах(1Л 1.15). При необходимости на входах локальных систем управления устанавливают редукционные клапаны для обеспечения найденных входных давлений на остальных участках системы (рис. 15.20). 5. Определение объемных потерь (внутренних утечек) при работе каждого гидравлического исполнительного органа. Суммируются все объемные потери не только на работающем участке системы, но и на аппаратах, соединенных с напорной линией рассматриваемого участка. Расход управления жидкости в редукционном клапане, А, 6f Аг Вг Aj 6j А4 А, Б, Аг AjBj А4В4 4, Б, АгВ AjBj АБ ♦ 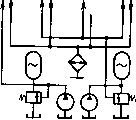 Рис. 15.20. Принципиальные гидравлические схемы возможных вариантов насосных станций (Л и £ то же, что на рис. 15,19) сливающейся в бак, приведен в каталогах, обычно он не превышает 13-20 см/с. Полагают, что характер потока внутренних утечек - ламинарный, поэтому величина их прямопропорциональна перепаду давления Ар на уплотняющих щелях аппаратов, т. е. Qy = kyjAp, где Ара - перепад давления на аппарате. В каталогах аппаратуры приведены либо величина утечек при указанном перепаде давления, либо коэффициент утечек, либо коэффициент объемного действия, который связан с коэффициентом утечек следующей зависимостью: где - величина потока, проходящего через аппарат, при давлении рд и коэффициенте объемного действия Цу. Ориентировочно для аппаратуры йут. ап ~ 0,017 см/(МПаС); для цилиндров йут.ц = 0,034-=-0,05 см/(МПа-с); для гидромоторов йут.м = 0,8-1,2 ш(МПа-с). 6. Определение величины необходимых подач рабочей среды для каждого гидравлического исполнительного органа в отдельности: Qp == Спол + Р- 7. Определение наибольшей производительности насосной станции, которая может потребоваться в процессе работы всех механизмов станка. Последовательность участия в работе гидравлических
|
|
© 2003 - 2025 Prom Izhora
При копировании текстов приветствуется обратная ссылка |