

|
|
Разделы сайта
Читаемое
Обновления Dec-2024
|
Промышленность Ижоры --> Станки механосборочного производства все уровни виртуальности (и прн этом будет достигнута нанбольшШ декомпозиция), либо смежные уровни могут образовывать едино! целое. Это объясняет существование большого числа вариантов структурной организации математического обеспечения микропроцессорных устройств ЧПУ. Выбирая, вариант, естественно отдать предпочтение более надежному математическому обеспечению, которое будет наиболее структурированным н логически стройным. 5. Модель является открытой сверху, что позволяет предположить существование еще более высоких уровней виртуальности, Пикропроцессор Физические адресное .пространство С Аппаратная шипа Интерфейс Физическая пашина Операционная систепа ЧПУ Првблепно-ориентировомая база данных. Базовый вычислитель Транслятор виртуальная пашина-устройство ЧПУ Операционная систепа sSmns назначения Прагроппно-ореакизовонные структуры данных физическая пашина Транслятор Виртулггьная еташина-вазовый вычислитель Рис. 24.3. Построение отдельных уровней ерархнн машин и связь между уровнями через шину: а - структура фиаической машины; б - базовый вычислитель; в - устройство ЧПУ которые могут появиться по мере увеличения функциональных возможностей ЧПУ. Так, помимо автоматизированной подготовки управляющих программ возможно представить в перспективе и какой-то вариант автоматизированного конструирования, по крайней мере, по отношению к некоторому классу деталей (например, шестерням). Взаимоотношение отдельных уровней иерархии виртуальных машин можно проиллюстрировать. На рис. 24.3 показано, что структуры отдельных уровней, по сути дела, одинаковы, и отдельные блоки каждого варианта структуры несут одинаковую по смыслу нагрузку. На рис. 24.3, а представлена структура фнзидеской машины (см. также рнс. 23.12), связь основных аппаратных блоков внутренней структуры в которой осуществляется с помощью аппаратной шины, а связь с внешним миром производится через аппаратный интерфейс. На рнс. 24.3, б показано, что сама физическая машина может служить программно-аппаратным средством связи блоков виртуальной машины - базового вычислителя, т. е. физическая машина становится программно-аппаратно-реалнзованной шнной. Внешним входом для этого уровня виртуальности являются программы, роль интерфейса для которых выполняет транслятор с ассемблера или языка высокого уровня. Путь к внешнему выходу управления лежит через физическую машину предыдущего иерархического уровня. Структура устройства ЧПУ, приведенная на рис. 24.3, в, идентична. Роль системы связи специфических блоков Входной текст панели оператора на языке заданий Входной текст управляющей прог-раппы на языке задач Сигналы обратной связи и осведопи-тепьные на языке станка Операционная cucmerfct ЧПИ Интерпретатор Ноппияятор Редактор Обрабать/вапщие лраграппы Управление заданияпи Управление задачами Управление донньщи Управляющие програппы Управпеиие рриводапи подачи Управление автопатакаИ станка Управление индикацией и визуялазациеН Рнс. 24.4. Операционная система ЧПУ и входные языковые средства ЧПУ данного уровня выполняет программно-реализованный базовый вычислитель более низкого иерархического уровня, т. е. на этот раз базовый вычислитель выступает в качестве программно-реализованной шины. Внешним входом для этого уровня виртуальности являются управляющие программы ЧПУ, интерфейсом для которых служит транслятор с языка управляющих программ. Путь к внешнему выходу управления лежит через нижние иерархии машин. Операционная система ЧПУ, представленная на рнс. 24.3, в в составе блоков устройства ЧПУ, имеет структуру, свойственную всем операционным системам. В ее составе можно выделить обрабатывающие программы (рис. 24.4). В комплексе управляющих программ различимы подсистемы управления заданиями, управления задачами, управления данными, причем программы управления задачами представляют собой то, что на уровне базовой операционной системы мы называли прикладным пакетом. В числе обрабатывающих программ - интерпретатор языка панели оператора, компилятор языка программ ЧПУ, редактор текста программ ЧПУ. Язык панели оператора устройства ЧПУ - это директивный язык для связи с операционной системой ЧПУ. По своему смыслу клавишные указания панели оператора предназначены для настройки операционной системы ЧПУ на выполне- ние определенного рода работ и являются, следовательно, элемен тами языка управления заданиями ЧПУ. Входной текст управляющей программы, содержащий геометрические, технологические и вспомогательные описания, относится к языку задач. Таким образом, устройство ЧПУ располагает теми же классами входных языковых средств, что и ЭВМ общего назначения, а кроме того, и дополнительным классом, который охватывает сигналы, поступающие со станка. К этому классу относится язык станка, т. е. язык объекта управления. ГЛАВА 25 СТРАТЕГИЯ ОРГАНИЗАЦИИ МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ЧПУ § 1. СОДЕРЖАНИЕ ПРОБЛЕМЫ МАТЕМАТИЧЕСКОГО ОБЕСПЕЧЕНИЯ Проблема разработки математического обеспечения ЧПУ имеет две составляющие. Содержанием первой является тщательная отработка отдельных, в принципе известных алгоритмов ЧПУ и создание новых частных алгоритмов. Накопленный фонд алгоритмов ЧПУ достаточно велик, тем не менее, он непрерывно пополняется. Широким фронтом продолжаются, например, разработки и уточнения алгоритмов многокоординатной интерполяции, реализация которых требует больших затрат вычислительной мощности, а потому нередко определяет саму архитектуру устройства ЧПУ. Вторая составляющая проблемы математического обеспечения ЧПУ - это координация всех алгоритмов ЧПУ, конкурирующих в запросах к ресурсам устройств ЧПУ. Сложность этой части проблемы в том, что общее число алгоритмов в системе ЧПУ исчисляется сотнями, и организация их взаимодействия является стратегической задачей, определяющей в конечном счете надежность математического обеспечения. Обращаясь к организации математического обеспечения ЧПУ, охарактеризуем функциональные проблемы, которые находятся в центре внимания разработчиков математического обеспечения: выделение процессов реального времени; структуризация математического обеспечения; организация базы данных; использование в проекте математического обеспечения принципов построения однородных вычислительных сетей, идей теории трансляции, принципов построения операционных систем. § 2. ВЫДЕЛЕНИЕ ПРОЦЕССОВ РЕАЛЬНОГО ВРЕМЕНИ В составе математического обеспечения ЧПУ обнаруживаются две группы процессов - подготовка данных в машинном масштабе времени и управление задачами реального времени (рис. 25.1). Эти процессы существенно различаются; при этом они должны быть синхронизированы между собой. Первую группу нередко называют медленной , а вторую - быстрой , что определяется как допустимой задержкой в исполнении процедур, так и временем исполнения процедур. Примерами медленных процессов могут послужить ввод и размещение программы, трансляция программы, внецикловые подготовительные расчеты для интерполяции и др. В качестве примеров быстрых процессов можно указать интерполяцию, управление разгонами и торможениями, управление
Ипрабкение задачапи Упрайкеиие Визуаяизацией и аиШаииеН ИпраШние злектроабтпатикса станка Дисплей СветоШ инЯикаиия
ПраШи зтктроНтонатмка Рис. 25.1. Две группы процессов в микропроцессорном устройстве ЧПУ приводами, компенсацию ошибок, .слежение за границами допустимого рабочего пространства и т. д. Синхронизация подготовки данных и управления задачами может быть выполнена на уровне базовой операционной системы реального времени, которая прикрывает от разработчика математического обеспечения ЧПУ необходимость детального распределения процессорного времени. Если операционная система реального времени не применяется, разработчик математического обеспечения ЧПУ сам создает те или иные механизмы взаимодействия указанных групп задач, как правило, на основе специальных программ-диспетчеров. Некоторые особенности механизмов взаимодействия поясним на примере. Пример - организация работы на постоянной несущей частоте, заданной цикличностью интерполяционных расчетов либо цикличностью управления приводами подачи, . , Принципы пошаговой интерполяции, разработанной для аппаратных устройств ЧПУ (на основе метода оценочной функции, цифровых дифференциальных анализаторов и др.), неприемлемы для микропроцессорных систем ЧПУ из-за ограниченного быстродействия процессора. Элементарные расчеты показывают, что длительность интерполяционного вычислительного цикла, привязанного к каждому унитарному импульсу, выдаваемому в привод, должна в этом случае (исходя из максимальной требуемой частоты пмпульсов) исчисляться еднницамн микросекунд, а это .невозможно. Не следует также забывать, что процессор должен обрабатывать и другие многочисленные задачи. По этой причине получил распространен не так называемый метод работы на постоянной несущей частого, организуемой таймером. Интерполяционный расчет в этом случае состоит не в определении необходимости выдачи унитарного импульса в привод той или иной координаты, а в вычислении Период постоянной несущей частотц Обработка быстрых проиессое, ства направо-двывапие приоритетов Фоновое дрепя 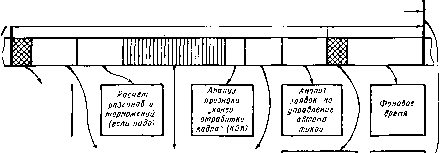 Прерывание, занесение данных прерванной задачи 6 стек Уайпернае прерывание
Восстановление данных прерванной задачи из стека Тайперное лрерыдание Рис. 25.2. Циклограмма взаимодействия быстрых и медленных процессов кодовых приращений для каждого привода на предстоящий период постоянной несущей частоты. Эту частоту выбирают в диапазоне 100-400 Гц, руководствуясь определенными, хотя и противоречивыми соображениями. С одной стороны, эту частоту хотелось бы уменьшить для того, чтобы в оставшееся от интерполяционного цикла время (в каждом периоде постоянной несущей частоты) могли быть обслужены н другие задачи. С другой стороны, эту частоту необходимо увеличивать, чтобы наилучшим образом воспользоваться фильтрующими способностями следящих приводов подачи (дискретность кодовых посылок не должна оказывать влияние на контурную точность). Теперь возникает возможность дать более точное определение быстрым н медленным процессам. К быстрым относятся те процессы, когорые начинаются н завершаются в рамках одного периода постоянно несущей частоты н не прерываются таймером. В число медленных могут быть включены процессы, которые не успевают закончиться н одном периоде постоянной частоты и прерываются таймером, причем прерывание процесса до его полного завершения может быть многократным. Эти прерываемые процессы называют также фоновыми. Диклограмма взаимодействия быстрых и медленных процессов представлена на рис. 25.2. Здесь показан пример распределения процессорного времени в рамках одного периода постоянной несущей частоты. В различных устройствах ЧПУ быстрые процессы обслуживаются либо соответственно их приоритетам, либо в жесткой последовательности. То же относится и к медленным процессам, занимающим фоновое время. Подобная организация управления может быть использовам и в однопроцессорных, и в мультипроцессорных устройствах ЧПУ. Рассмотрим, например, построение управляющего процесса в устройстве с четырьмя микропроцессорами, функции которых распределены следующим образом. Первый микропроцессор (ведомый) занимаетси обслуживанием приводов, вычислениями, связанными с замыканием контуров следящих систем, а также и неко- торыми другими задачами реального времени {адаптивное управление и др.). Небольшое время занимают фоновые программы связи и обмена информацией. Второй микропроц :сор (ведомый) формирует управляющие команды на основе интерполяционных расчетов соответственно управляющей программе. Необходимые Обнаружение задания на круговую иитерпаяяциа, передача ткропрацессору 2 Передача первого приращения Передача второго приращения и т.д. - Новая инструкция Ш интерполяции исполнению отсанзвленных задач  Ведущий пикропроцессор Виецикйовые расчеты, необходимые для круговой иитермляиии Расчет приращений и накопление их в яачтовоп ящике Ожидание свободного места В na*imoSon -ящике \ Расчет Конец заданногоперепещения, омидание команды-. и\5\б  Пикропроцессор 2 -Управление привадам -Обработка информации с датчиков обратной связи (-Новые внециклоВые расчеты 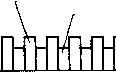 Пикрваррцессор 1 -Чтение датчика обратной связи, выдача управляющик сигналов - Превваритеяьиые (оиережапщие) расчеты, адаптивное управленае -Фоновые задачи- обмен данными и связь с ведущим микропроцессора 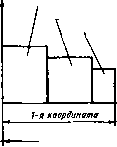 г-я кворданата 3-я коврдината Период постоянней нкущей частоты Рис. 25.3. Циклограмма совместной работы микропроцессоров устройства ЧПУ при круговой интерполяции: а - упрощенная циклограныа, не отражающая миогокоордкнатного управления; 6 уточнение применительно к многокоордннатному управлению для Этого данные поступают от ведущего микропроцессора. Здесь нет основной и фоновой секций, нет необходимости в прерываниях, выполняемые задачи носят чисто вычислительный характер. Эти вычисления создают определенный задел в интерполяционных циклах и прекращаются только тогда, когда заполннется собственная
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |