

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика к - mgrl, где г3 - радиус Земли, g - ускорение силы тяготения на ее поверхности, поэтому сила гравитационного поля Земли, действующая на точку М, обратно пропорциональна квадрату расстояния от материальной точки до центра Земли (для случая г > Гз, а также в предположении, что Земля - однородный шар либо шар с концентрическим распределением масс), т. е. Fmgrllr 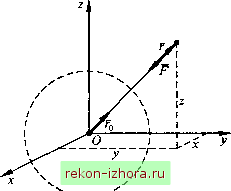 Рис. 15.37 Введем единичный вектор г. Тогда F = -r-rQ и так как r=rFQ, то F =-кг/г . Элементарная работа силы тяготения -к к (к dA = Fdr=-7dr=-Ardr = d г г Отсюда силовая функция а потенциальная энергия п = - + с,. Поверхностями уровня U(x,y,z) = C ньютоновского гравитационного поля будут концентрические сферы с центром в на- чале координат, а силовыми линиями - прямые, проходящие через начало координат, так как из U = klr = C следует г = Jx + -\-z = const, или jc + j; + = const. Отметим, что изложенное в § 15.7 применимо как для одной материальной точки, так и для механической системы, так как выполняется закон суперпозиции силовых полей. Закон сохранения механической энергии Пусть все силы (как внешние, так и внутренние), действующие на механическую систему, потенциальны, т. е. существует функция U(x,y, zi,л:, j;, z), такая, что г, dU dU dU кх -т-. ку -Т- kz (15.112) dXk ду dz где ffi + ffj + fjk = fj - равнодействующая всех сил, приложенных к Л-й точке. Теорему об изменении кинетической энергии системы в дифференциальной форме представим в виде dt = Yfkdrk. (15.113) TjxGFj,dr,={fjfufj)dr, Так как, согласно (15.112), ILh drk=(ffdXk +fkydyk +fjdzk) = dV dU dU = dU, k=\\k k 4 TO уравнение (15.113) примет вид dT = dU, dT + dn = 0, где П = -U(xi,y,2i,...,Xf уi,Zfj) +const - потенциальная энергия системы. Следовательно, 26 зак. ,6 (Г + Я) = 0, отсюда получаем Г + Я = с0п81 Е = Т + П = Т+П =const. (15.114) Сумма кинетической и потенциальной энергии называется полной энергией Е механической системы. Системы, для которых выполняется закон, сохранения механической энергии, называются консервативными. Формула (15.114) выражает закон сохранения механической энергии для механической системы: если все сшы, действующие на систему, потенциальны, то при движении системы ее полная механическая энергия постоянна. Следует отметить, что закон сохранения механической энергии справедлив и в том случае, когда кроме потенциальных имеются и непотенциальные силы, но которые при движении системы не совершают работы. Пример 15.8. Груз 1 массой с помощью нерастяжимой нити, переброшенной через блок 2 массой приводит в движение ступенчатый каток 3 массой (рис. 15.38). Нить намотана на меньшую ступень катка, радиус которой г, и по блоку 2 не скользит. Каток, большая ступень которого имеет радиус R, катится без скольжения по горизонтальной плоскости; его радиус инерции относительно центра масс р, а коэффициент трения качения 5. Определить скорость груза в зависимости от высоты его опускания И, если в начальный момент система покоилась. Трением в оси блока, а также массой нити пренебречь. Принять, что масса блока равномерно распределена по ободу. Решение. К движению механической системы, состоящей из груза, нити, блока и катка, применим теорему об изменении кинетической энергии в форме (15.97): T = t4t4> (15.115) в которой Tq=0, так как в начальный момент времени система покоилась. Обозначим через Г Гз и кинетическую энергию соответственно груза, блока и катка после опускания груза на высоту h. Тогда где J = т2Г2 ; Гз - радиус блока 2; Jcz= Так как нить нерастяжима и относительно блока и катка не скользит, то
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |