

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Из последнего уравнения (16.23) следует со = const = со.. (16.26) На основании (16.25), (16.26) получаем со + со = const = со. (16.27) Решения (16.26) и (16.27) означают, что при движении тела модуль его угловой скорости вращения остается постоянным, т. е. со =со +С0у +со = const. Тогда, согласно (16.15) и (16.17), вектор ш образует с неподвижным вектором постоянный угол а. Следовательно, при аФ постоянный по модулю вектор ш может лишь вращаться вокруг вектора , а при а = О он совпадает с неподвижным вектором Kq , т. е. в обоих случаях поведение вектора ш соответствует уравнению (16.21), в котором Q - пока неизвестная угловая скорость вектора ю . Направим ось Oz системы по вектору Kq , а оси OY и OZj системы iS2 так, чтобы проекции Kyj =А(!ду2 и Kyj =z -= Ссо = const были неотрицательны (рис. 16.6). Тогда будут неотрицательны угол нутации 6, проекции С0у,2 =со й СО; =со . Из формулы К у = KqCOsQ , связывающей модуль вектора с его проекцией на ось (9Z, следует, что при постоянных Ку и Kq угол нутации в процессе движения тела не изменяется: e = const=eo>о; ё=о. При угловой скорости нутации 0 = 0 вектор ш = + фАГ расположен в плоскости П, образуя с вектором Kq постоянный угол а . Это означает, что вектор ш неподвижен в плоскости П : =0;сОу,2 =cosin(0o -a) = vi/sin0o = const = со. >0; (16.28) /л =cocos(0o -а) = ф +vj/COS0O = const = со. >0, и поэтому Q = vj/ = const = vj/q > 0; ф = const = фо . (16.29) Перейдем к количественным оценкам и исследуем зависимость констант Н/(),фо,Эо от постоянных проекций со и со вектора ш на оси системы .S2. Из геометрических соображений (см. рис. 16.6) ctgOo =A:z2/y2 =Ссо,7(со) = (г + 1)со,;/со 0, (16.30) т. е. при несовпадении оси динамической симметрии OZ с направлением вектора са(со >0) она описывает конус вокруг неподвижной оси Oz, образуя с ней постоянный угол Oq < 7i/2 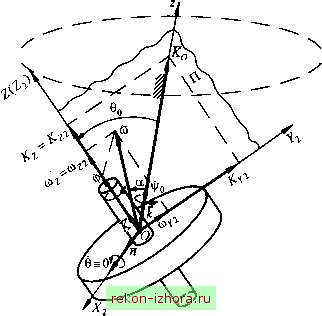 Рис. 16.6 Подставим выражения (16.28) для проекций вектора ш в (16.30): vi/oSinOo =С(фо +vi;ocos0o)tg0o. Отсюда при sin Bq О .=Ч/о=Сфо/[(-С)со80о]. (16.31) Соотношение (16.31) указывает на то, что угловая скорость собственного вращения фАГ в зависимости от формы эллипсоида инерции тела либо совпадает по направлению с осью OZ при С <А - прямая регулярная прецессия, либо противоположна ей при С> А - обратная регулярная прецессия. Итак, на основании формул (16.28)-(16.31) параметры регулярной прецессии удовлетворяют следующим уравнениям: ctgGo =( + l)cO(7co*;Q, =4/0 =co/sineo ;фо =-сО(; ... v/ = cor/sm 00 + v/o; ф = -eiit + фо. Из двух первых формул (16.32) следует, что если со О, то угол 00 О, а угловая скорость прецессии =V(/o ->(1+г)С0(. (16.33) Наглядное представление о регулярной прецессии можно получить, рассматривая, например, твердое тело в виде однородного кругового конуса, которое равномерно перекатывается без скольжения по внешней поверхности неподвижного кругового конуса при условии, что вершины конусов совпадают в точке О (рис. 16.7). Ось симметрии подвижного конуса является его осью динамической симметрии OZ. В каждый момент времени вектор ш направлен по линии контакта конусов. При регулярной прецессии вектор главного момента количеств движения тела относительно вершины О неподвижен, т. е. его направление не зависит от текущего положения тела. Следовательно, в этом случае по соображениям симметрии он должен быть направлен по оси Oz неподвижного конуса. Подвижная плоскость П проходит через оси OZ и Oz конусов. Постоянный угол между этими осями является углом нутации 0. Равномерное вращение оси OZ вокруг оси Oz соответствует изменению угла прецессии v;, а вращение тела вокруг оси OZ относительно плоскости П - изменению угла собственного вращения ф. Если неподвижный конус расположен по отношению к подвижному внешним образом (см. рис. 16.7, а\ то его движение соответствует прямой регулярной прецессии, а если внутренним образом (случай полого подвижного конуса) - то обратной регулярной прецессии (см. рис. 16.7, б). Пусть при этом =а)(, = 1 рад/с, = 5 = 1 кгм , С = 2 кгм (рис. 16.8). Тогда О) = V2 рад/с , у = arctg(о)/ш-) = 45°, г = (С - Л)1 А = 1, /Cj = /о) = = 1Н.м.с, /:22=<о)г = 2Н.мс, /С=л/5 Нмс, tgGo =/Cyj/zi = 0,5 , 00 = 26,5° , vio = /sin 00 = л/5 рад/с, фо = -гЮ( = -1 рад/с, а = 0о - у = = -18,5° . Можно доказать, что всегда а < 19,28° .
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |