

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Предположим, что движение волчка (рис. 16.12) удовлетворяет условию (16.18). В этом случае векторы w и Kq расположены в подвижной вертикальной плоскости П . Убедимся, что эти векторы также неподвижны в плоскости П . 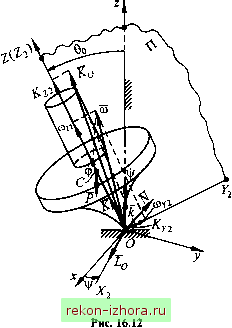 Сначала покажем, что угловая скорость со тела постоянна по модулю. При условии (16.18) в неподвижной системе Sq аппликата центра масс z. =/cos0o = const, и, следовательно, постоянна не только потенциальная Я, но, согласно интегралу сохранения полной механической энергии, и кинетинеская энергия Т волчка. А так как в случае Лагранжа со = const (см. (16.36)), то на основании выражения (16.25) приходим к выводу, что со +С0у = const и со +С0у +со = const, т. е. угловая скорость волчка постоянна по модулю. При I ш I = const (0x2 - О, co22 =0)2= const = co, третья проекция также постоянна: (Оу2 = const = сОд. Поэтому вектор ш, а следовательно, и вектор Kq неподвижны в плоскости П системы 52 и удовлетворяют соответствующим уравнениям (16.21), (16.22) при вертикальном направлении вектора угловой скорости прецессии Q=fk , Заметим, что, согласно уравнению (16.22), регулярная прецессия (Lq =0) является частным случаем псевдорегулярной прецессии (Lq ФО). Очевидно, что помимо уже перечисленных констант при псевдорегулярной прецессии а = const; \j/ = const = ; Ф = const = ф, т. е. законы изменения углов Эйлера аналогичны случаю регулярной прецессии. Рассмотрим теперь влияние силы тяжести и начальных значений проекций со на постоянные Gq , xj/q и ф. Раскроем Lq в выражении (16.22): Kq=QxKq=OCxP , (16.37) Векторы ОС и Р лежат в плоскости П , поэтому вектор Mq(P) параллелен горизонтальной оси ОХ 2, т. е. направлен по линии узлов. В проекции на эту ось выражение (16.37) имеет вид Qj.2z2 - Z2r2 = PI sin Go , (16.38) [С(фо + cos Go) - AVo cos Gq ]\/о sin Go = PI sin Gq . После сокращения на sinQqO (при sinGq = О имеем случай Эйлера Lq=0) получаем [С(фо +\/о cosGo)-Axj/o cosGolVo (16.39) Это уравнение является квадратным относительно Q = xj/q : (С - A)Q cos Go + СфоЙ - Р/ = О. (16.40) При cos Go = О оно имеет один корень й = Р Сфо, а при cos Go О - два: 1,2=Сфо/[2(С-)со8ео]х X [-1 ± 1 + 4Р/(С - А) cos Go /(Сфо fl Уравнение (16.40) имеет действительные корни при cosGq 0, если (Сфо) +4P/(C-)coseo >0. (16.41) Соотношение (16.41) является необходимым условием суш;ество-вания псевдорегулярной прецессии. Данный вид движения возможен лишь при достаточно большой угловой скорости Фо *: Фо >coL =4P/cos0o(-C)/c. (16.42) Допустим условие (16.42) выполнено, а угловая скорость фо настолько высока, что = (шшМ =4Р/(С)со8ео/(Сфо) 1. (16.43) Используем малость ц для нахождения корней уравнения (16.40): 1.2 =Сфо/[2(С-)со80о][-1±7Гп]. Приближенно вычислив дискриминант /l + ц 1 + 0,5li , получаем -1 + (1 + 0,5ц) 0,5ц; -1 - (1 + 0,5ц) -2 - 0,5ц. Таким образом, корни уравнения (16.39) Q, -Сфо/(С-)со8 0о -Р (Сфо); (16.44) а2 (Сфо). (16.45) Первое слагаемое в (16.44) не зависит от силы тяжести волчка и соответствует быстрой скорости регулярной прецессии (16.31) в случае Эйлера, прямо пропорциональной скорости собственного вращения фо. Этот вид движения волчка возможен при малом моменте Р1 и быстром собственном вращении. * Установлено, что требование фо > 4Р1(А - С)/является необходимым и достаточным условием устойчивости спящего волчка (> О, Gq = О ). При этом волчок, эллипсоид инерции которого выгянут вдоль оси OZ (А>С), должен иметь более высокую скорость собственного вращения, чем волчок с эл-лршсоидом инерции, сплюснутым вдоль оси OZ (С > А) .
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |