

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Второй корень (16.45) соответствует медленной прецессии оси динамической симметрии также при малом моменте PL Скорость медленной прецессии обратно пропорциональна скорости собственного вращения фо. Поскольку скорость прецессии в этом случае зависит от силы тяжести, этот вид движения также называют вынужденной прецессией. Дадим математическое объяснение полученным результатам. При условиях (16.18), (16.36) уравнения (16.35) вырождаются в систему линейных дифференциальных уравнений относительно проекций сОд , соу.. Ее решение можно представить в виде суммы функций, одна из которых является общим решением однородной, а другая - частным решением неоднородной системы. Общее решение описывает собственное движение, а частное - вынужденное движение. Формулы (16.44), (16.45) этому полностью соответствуют. На практике при наблюдении за движением быстровращающегося волчка глаза фиксируют именно вынужденную прецессию в виде достаточно медленного движения оси волчка, описывающей конус вокруг вертикали. Собственная (быстрая) регулярная прецессия почти мгновенно затухает из-за естественных потерь на трение. Таким образом, псевдорегулярная прецессия обобщает случай регулярной прецессии; она возможна при любом угле нутации, но лишь при специальных начальных условиях. Приближенная теория гироскопа Для быстрой оценки параметров движения гироскопа в заданных физических условиях используют приближенные аналитические методы, называемые приближенной, или прецессионной, теорией гироскопа. При условии быстрого вращения тела она применима для тел с произвольной формой эллипсоида инерции в точке Д В ее основу положены свойства вынужденной регулярной прецессии. Благодаря некоторым допущениям данная теория сводит анализ сферического движения твердого тела к изучению лишь прецессионного движения оси собственного вращения без учета изменений угловой скорости собственного вращения и угла нутации. Приближенная теория гироскопа построена на теореме об изменении вектора в форме, аналогичной (16.22): K =nxKo=Lo. (16.46) Здесь приближенно считают, что неподвижный относительно твердого тела постоянный по модулю вектор Kq вращается относительно системы Sq с угловой скоростью Q. Рассмотрим допущения, которые позволяют обосновать уравнение (16.46). 1. Модуль проекции вектора ю на главную ось инерции OZ тела много больше модулей остальных проекций: со со +со . (16.47) Из кинематических уравнений Эйлера в этом случае следует ф v(/-+0. (16.48) Поэтому в приближенной теории наиболее быстрым считается собственное вращение. Это допущение совпадает с аналогичным требованием в условии существования вынужденной прецессии (16.45). В современных гироскопических приборах угловые скорости собственного вращения роторов достигают 10000 рад/с. Отметим, что неравенству (16.47) могут удовлетворять и сравнительно малые угловые скорости, например для Земли угловая скорость собственного вращения составляет всего 7,26 10 рад/с . Условия (16.47), (16.48) не следует дословно понимать как стремление полностью пренебрегать значениями угловых скоростей ф и 0. Их малость используют только на стадии приближенной оценки модуля и направления вектора Kq , чтобы затем с помощью вектора Kq получить информацию о поведении углов v/ и 0. 2. Проекция вектора ю на главную ось инерции OZ тела постоянна по модулю: со = const = а)(. >0. (16.49) 3. Модуль проекции вектора Kq на OZ много больше остальных проекций (рис. 16.13): К1 К1 +К, (16.50) Для тел с соотношением главных моментов инерции С>А, С > В условие (16.50) является следствием (16.47). Из рассмотренных трех вытекают еще два допущения приближенной теории гироскопа. 4. Вектор Kq имеет постоянный модуль, равный его проекции на ось собственного вращения OZ: Kq =j(A(o) +(В(Оу) +(С(оУ С(Оу =С(о =К2 = const. 5. Вектор Kq направлен по оси OZ тела: Кп = А(0у1 + B(OyJ СсОуК fCcOyK =С(ОгК (16.51) (16.52) Соотношения (16.51), (16.52) оправдывают возможность применения теоремы об изменении вектора Kq в форме (16.46), позволяющей по поведению вектора Kq судить о движении оси OZ, так как теперь угловая скорость вращения оси OZ является и угловой скоростью вращения вектора Kq . Наконец, еще одно допущение постулирует направление вектора главного момента внешних сил Lq . 6. Вектор главного момента внеш- I них сил Lq перпендикулярен к вектору Kq . Неперпендикулярность. Lq и Kq Рис. 16.13 приводит к изменению модуля Kq , что противоречит четвертому допущению. В приближенной теории гироскопа многие выводы строятся на основании геометрической интерпретации теоремы об изменении главного момента количеств движений, предложенной французским ученым Резалем (см. § 15.5). Так как в рамках этой теории вектор Kq постоянен по модулю, его изменение может быть вы- 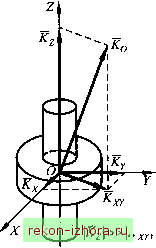
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |