

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Решение. Общее уравнение динамики для диска имеет вид Возможные работы сил нормальной реакции N и трения скольжения равны нулям, так как они приложены к неподвижной в каждый момент времени точке - МЦС диска. Зададим диску возможное перемещение, при котором точка С получит перемещение 5. Тогда bA(P) = Psinabsc . Момент трения качения Лтр=(Лтр)шах=Л = Лс08а ЩМ) = -Л/5ф = --cosa dsc. Главный вектор и главный момент сил инерции точек диска относительно оси Cz соответственно равны где 8, = - г Возможные работы g 2g Таким образом, У 64 = Psina.bsc - Pcosa bs --a-bs -llL = q . Отсюда находим Sina--cosa r Пример 18.10. В механизме, показанном на рис. 18.15, кривошип 1 массой т, и длиной /, вращаясь вокруг неподвижной горизонтальной оси Oz, при помощи шатуна 2 такой же длины приводит в движение ползун 3 массой . Ползун 3 соединен пружиной 5 с ползуном 4 массой .К кривошипу приложена пара сил с постоянным моментом Л/,. Коэффициент жесткости пружины с. Пренебрегая трением в шарнирах и направляющих, а также массой шатуна и принимая кривошип за однородный стержень, составить дифференциальные уравнения движения механизма. 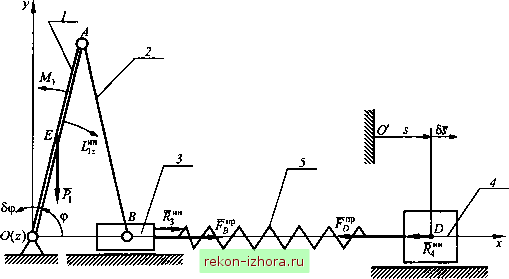 Рис. 18.15 Решение, Система имеет две степени свободы. В качестве обобщенных координат выберем угол ф поворота кривошипа 7 и координату s ползуна 4. При ф = О и 5 = 0 пружина 5 не деформирована. Задавая системе возможные перемещения, при которых 5ф10, = 0 и 5ф = 0,5510,с помощью принципа Даламбераг-Лагранжа получим два уравнения А/,5ф+Оф+ + RB + FB = О; (18.18) F55+;;Ss = 0. (18.19) Главный момент сил инерции кривошипа 1 относительно оси Oz и главные векторы сил инерции ползунов Зи4 соответственно равны где а, =х1; =-2/(ф8тф+фсо8ф); 5, =лг7. Кроме того, Piy-mgl 5у£=со8ф-6ф; =2тз/(ф8тф+фсо8ф); bxg =-2/8тф-6ф; =с[5 + 2/(1-со8ф)], =-с[5 + 2/(1-со8ф)]. Подставляя выражения для проекций сил и возможных перемещений в (18.18), (18.19) и сокращая на 5ф и 8, получаем A/i - Jmj/ф - 4тз/ф8Ш Ф - Iml sin 2ф - С08ф - - 4с/ (l - С08 ф)8т ф - 2c/j sin ф = О; ms + CS + 2c/(l - С08ф)=О. Принцип Гаусса (принцип наименьшего принуждения) Рассмотрим механическую систему, состоящую из материальных точек, на которую наложены идеальные связи. Пусть положение к-и точки в момент времени / определяется радиус-вектором (t). Тогда в момент времени Г + Л при движении по истинной траектории радиус-вектор этой точки будет F (t + dt), причем ri,(t + dt) = rf,(t)Vf,(t)dt + aj,(t)dt -н.... (18.20) Рассмотрим движение к-й точки по кинематически возможной траектории. Кинематически возможной является траектория,
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |