

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Дифференцируя левую и правую части приведенного выше векторного соотношения и учитывая, что d АВ/Л=0, получаем drg/dt = dr/dt, или Vgv. Дифференцируя по времени левую и правую части полученного соотношения для скоростей, находим dvg/dt = dvj/dt,ши 5 = . На основании вышеизложенного можно сделать следующий вывод: чтобы задать движение и определить кинематические характеристики тела, совершающего поступательное движение, достаточно задать движение одной его любой точки (полюса) и найти ее кинематические характеристики. Как и материальная точка, тело при его поступательном движении будет иметь одну степень свободы при движении по направляющей, задающей траекторию его точкам; две степени свободы в случае движения на плоскости (при постоянном контакте с ней хотя бы одной точкой) и три степени свободы в общем случае движения в пространстве. 2.3. Вращение твердого тела вокруг неподвижной оси Вращением твердого тела вокруг неподвижной оси (или просто вращательным движением) называется такое движение твердого тела, при котором в теле можно выделить прямую, все точки которой будут оставаться неподвижными во время движения. Эта прямая называется осью вращения твердого тела. Очевидно, что для ее задания достаточно указать как минимум две неподвижные точки в рассматриваемом теле, через которые она проходит. Алгоритм задания вращательного движения может быть определен на основе следующего анализа. Введем неподвижную прямоугольную декартову систему координат Oxyz и аналогичную подвижную систему координат OXYZ, жестко связанную с рассматриваемым телом, расположив оси Oz и OZ на оси вращения тела (рис. 2.4). Пусть в начальный момент времени оси координат подвижной и неподвижной систем совпадали. Тогда положение вращающегося тела относительно неподвижной системы координат в любой текущий момент времени однозначно определится значением двугранного угла ф между неподвижной плоскостью Oxz и подвиж- 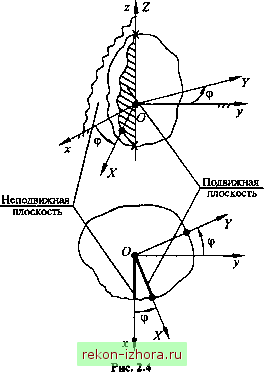 ной плоскостью 0X1 вращающейся вместе с рассматриваемым телом. Таким образом, при вращении вокруг неподвижной оси тело имеет одну степень свободы, так как его положение в неподвижной системе координат Oxyz однозначно определяется значением одного скалярного параметра - угла ф. Уравнение, определяющее изменение этого угла как фуюащи времени, общего вида ф = ф(0, где ф(0 - непрерывная дважды дифференцируемая функция времени, называется законом врагценш твердого тела вокруг неподвижной оси. * Угол ф также можег бьпъ углом меясду любой неподвижной плоскостью, проходящей через ось вращения, и подвижной, связанной с телом и также проходящей через указанную ось плоскостью. Отношение изменения угла поворота тела вокруг неподвижной оси к промежутку времени называется средней угловой скоростью вращения тела: Аф ф(Г + At) - ф(0 А А Предел этого отношения при Аг-0 называется угловой скоростью вращения тела в момент времени г. dip Аф ф = -= lim - . dt AfO At Здесь ф - скалярная алгебраическая величина, которая может принимать положительные и отрицательные значения. На чертеже )тол поворота тела и направление угловой скорости принято условно изображать дуговыми стрелками. При этом за положительное направление отсчета угла ф обычно принимают направление, противоположное направлению вращения часовой стрелки, если смотреть с положительного направления координатной оси, совмещенной с осью вращения тела. Это, в частности, соответствует так называемой правой декартовой системе координат. Угловую скорость можно определить и как вектор ш, расположенный на оси вращения и равный ю = ф , где к - единичный вектор, задающий положительное направление оси вращения, или орт оси Oz (рис. 2.5). Проекция вектора угловой скорости на ось вращения Oz со = = ф, т. е. она равна угловой скорости вращения тела. Положительные направления отсчета ф, ф и оси Oz соответствуют правой декартовой системе координат. Численное значение угловой скорости ш равно модулю вектора ш и определяется как модуль проекции со либо как модуль угловой скорости тела при его вращении вокруг неподвижной оси:
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |