

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика Векторный момент пары сил есть вектор М -M(F,F), перпендикулярный плоскости действия пары, направленный в ту сторону, откуда видно, что пара сил стремится повернуть тело против направления вращения часовой стрелки, и численно равный произведению модуля одной из сш пары на ее плечо. Остается выяснить вопрос о точке приложения этого вектора. Определим векторный момент пары сил относительно произвольной точки О (рис. 8.30) M(F)-f Л7(П = Г, xF + r xF\ Таккак F = -F и Гд -г =АВ,то Мо (F) ¥MoiF)ABxF= M(F, F). (8.14 ) 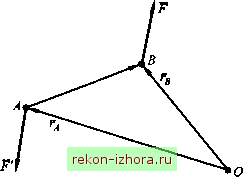 Рис. 8.30 Таким образом, векторный момент пары сш равен векторному моменту одной из ее сш относительно точки пршожения другой сшы ши сумме векторных моментов ее сш относительно произвольной точки О. Так как выбор точки О произволен, то вектор М можно считать приложенным в любой точке тела, т. е. этот вектор свободный. Поэтому пару сил можно переносить куда угодно в плоскости и в параллельную плоскость, изменяя модуль силы и плечо пары, но сохраняя при этом неизменными модуль момента пары и направление, в котором она стремится вращать твердое тело. Две пары сил, имеющие одинаковые векторные моменты, эквивалентны независимо от того, где каждая из них расположена (на одной плоскости или в параллельных плоскостях) и чему равны модули сил и плечи пар. Если пары расположены в одной плоскости, то их векторные моменты будут направлены перпендикулярно этой плоскости в ту или иную сторону в зависимости от направления, в котором пара стремится вращать тело. Поэтому в данном случае моменты пар можно различать по модулю и знаку, т. е. можно рассматривать как алгебраические величины. Условимся, придерживаясь правой системы координат, считать момент пары сил положительным, если она стремится вращать тело против направления движения часовой стрелки, и отрицательным при противоположном направлении вращения. Тогда для плоской системы пар сил M = t,=t±F,d,. Теорема о сложении пар сил. Вся совокупность пар сил, действующих на тело, эквивалентна одной паре сил, векторный момент которой равен сумме векторных моментов всех пар сил. Доказательство. Если на тело действует несколько пар сил, расположенных произвольным образом, то для их сложения и приведения к одной паре сил можно применить выражение (8.14). В самом деле, если векторные моменты пар сил равны Mj, М2,..., ,..., , то сумма моментов всех сил, образующих: эти пары, относительно какой-либо точки О равна MfAFkff,. (8.15) Формула (8.15) выражает теорему о сложении пар сил. На основании формулы (8.15) можно сформулировать условие равновесия системы пар сил, действующих на твердое тело. При равновесии М = Х*=0- (8-16) Пример 8.6. На твердое тело, имеющее форму куба (рис. 8.31), по трем его граням действуют пары сил , F{ \ , и F3, F/, Модули моментов пар М, =60Нм, Л/2=20Нм, Л/з =20Нм. Найти результирующую пару сил. 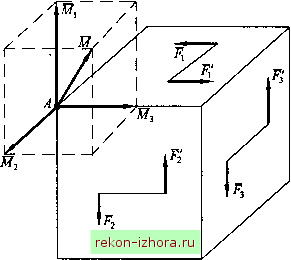 Рис. 8.31 Решение. В некоторой точке А построим векторы моментов пар сил , , Л/3. Поскольку эти векторы взаимно перпендикулярны, то модуль результирующей пары сил Л/ = Л/,ЧМ2+Л/ =>/бОЧ 20420 =20VnH.M. Направление вектора Л/ определяется косинусами углов между векторами Л7 2, Л7з и Л7: cos(a7,:a7) = = -; cos(A7,:M) = = -1=; с08(А/з ,М) = - = -
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |