

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Теоретическая механика 8.6. Приведение системы сил к простейшей системе Теорема о параллельном переносе силы Теорема. Силу, приложенную к твердому телу, можно, не изменяя ее действия, перенести параллельно самой себе в любую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, в которую она переносится. Доказательство. Пусть в точке А на тело действует сила F (рис. 8.32, а). Приложив в точке 5, куда переносится сила F из точки А эквивалентную нулю систему сил F* = -F = F (рис. 8.32, б), получаем силу F\ приложенную в точке В, и пару сил (jp , F ), векторный момент которой М = BAxF = Мд(F), что и требовалось доказать. На основании этой теоремы можно любую систему сил, действующих на твердое тело, перенести в одну точку и заменить одной силой и парой сил (рис. 8.32, в). 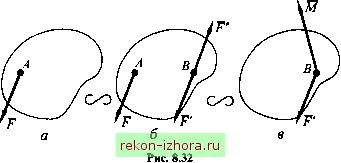 Приведение системы сил к заданному центру Точку, к которой приводят систему сил, называют центром приведения данной системы сш. Теорема. Произвольную систему сил, действующих на твердое тело, можно привести к какому-либо центру, заменив все действующие силы одной силой, равной главному вектору системы сил, приложенному в этом центре, и одной парой сил с моментом, равным главному моменту системы сил относительно того же центра. Пусть на твердое тело (рис. 8.33, а) действует произвольная система сил (Fj,72,Ft,). Возьмем какую-либо точку О за центр приведения и, пользуясь теоремой о параллельном переносе силы, перенесем все силы в эту точку, присоединяя при этом соответствующие пары. На тело теперь действует система сил (F/,2,...,/,...,), приложенных в точке О, и система пар сил, векторные моменты которых Mo(F,), Mo(F2l. Mo(F,\...,Mo(F). При этом F;=F где A: = l,2,...,iV. 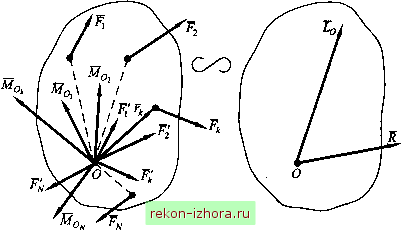 Рис. 8.33 Силы, приложенные в точке О, заменяются одной силой R *, которая равна главному вектору системы сил RfF,. (8.17) Систему пар сил можно заменить одной парой, момент которой М = ;Ло№) = Е(* х*) = 4- (8-18) равен главному моменту системы сил относительно центра приведения (рис. 8.33, б), т. е. М = Lq. Заметим, что главный вектор системы сил не зависит от выбора центра приведения. Он вычисляется по такой же формуле, что и равнодействующая, но при этом не эквивалентен данной системе сил. На основании доказанной теоремы можно сформулировать условие эквивалентности системы сил: две системы сш, пршо-женных к твердому телу, эквивалентны, если они имеют одинаковые главные векторы и главные моменты относительно одного и того же центра. В противоположность главному вектору главный момент системы сил зависит от выбора центра приведения. Теорема Вариньона о моменте равнодействующей Теорема. Если данная система сил имеет равнодействующую, то момент равнодействующей относительно любой точки О равен сумме моментов сил системы относительно той же точки . Доказательство. Пусть некоторая система сил (F, ,...,
,..., /дг) имеет равнодействующую * = F , приложенную в точке а (рис. 8.34). Перенесем r * в произвольную точку О - центр приведения - параллельно себе. При этом добавится пара сил (/?*, r ) q моментом М = Mq (/?*). Кроме того, М есть главный момент системы сил относительно центра О, равный сумме моментов всех сил относительно этого центра, т. е. 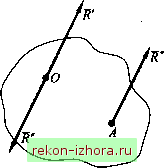 Рис. 8.34 П. Вариньон (1654-1722) - выдающийся французский математик и механик.
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |