

|
|
Разделы сайта
Читаемое
Обновления Apr-2024
|
Промышленность Ижоры --> Пространственные размерные цепи Аналогичным образом можно записать матрицы поворотов системы Г вокруг других осей. Уравнение координат точки М в системе S, когда система Г повернута на угол \/ вокруг оси 0Y: х = х cosy - Z smy; Z = -A:sin V + zcosvi/. Отсюда
Уравнение координат точки Л/ в системе S, когда система Г повернута на угол 6 вокруг оси 0Z: X = д:cos 9+ >(-sin 9); > = A:sin9 + >(cos9); z = z. Отсюда cos9 -sin9 0 sin 9 cos 9 0 0 0 1 (1.8.8) В обшем случае, когда система L повернута относительно системы L и их начала не совпадают, радиус-вектор точки М, определяющий ее положение в системе S, будет иметь следующее выражение: F = Fq + MF, где Fq - радиус-вектор, определяющий положение начала координат системы Ъ в системе S. Пользуясь формулами перехода (1.8.5) - (1.8.8) из одной координатной системы в другую, запишем уравнение радиус-вектора F, определяющего положение точки М в координатной системе Li, эквивалентной схемы (см. рис. 1.8.11). С этой целью вернемся к равенству (1.8.4) и запишем значение R с учетом поворотов координатных систем 1,2, S4 в системе S3. Положение точки М в системе Si (см. рис. 1.8.11) определяется радиус-вектором R , уравнение которого имеет вид (1.8.9) Положение точки М в системе S2 (рис. 1.8.14) определяется радиус-вектором F2, уравнение которого найдем следующим образом. Вначале запишем уравнение радиус-вектора R, считая, что положение точки М в системе S2 известно, тогда откуда R =?02 +22-М2Г2 = -Ь2. r2 = Ml\R~r2\ (1.8.10) (1.8.11) Теперь найдем положение точки Л/в системе Ii (рис. 1.8.15); ее положение определяется радиус-вектором г . Сначала запишем уравнение 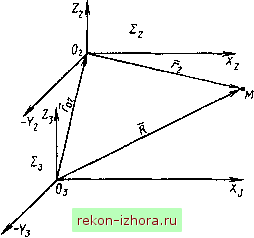 Рис. 1.8.14. Схема определения положения точки Л/в системе 22 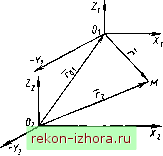 Рис. 1.8.15. Схема определения положения точки М в системе 2i радиус-вектора л , считая, что положение точки Мъ системе L2 известно, тогда или М,г=Я,-Яо). (1.8Л2) Подставим в выражение (1.8Л 2) значение F,: M,F = Mj(-%)-Fo,. В полученное выражение подставим значение R M,F = MJ(M4F, + - F02) -01 (1 -S. 13) Проведя преобразования, получим уравнение (1.8.13) следующего вида: г = М MiiMi-A-i-M-i-m)- (1.8.14) Уравнение (1.8.14) позволяет определить координаты точки получаемой поверхности детали. Чтобы определить все точки поверхности, надо в (1.8.14) ввести параметры движения координатных систем в соответствии с кинематикой станка. Например, у токарного станка, эквивалентная схема которого показана на рис. 1.8.8, в соответствии с его кинематической схемой координатная система 1ш имеет вращательное движение вокруг оси ОХ, а координатная система S - поступательное движение вдоль оси ОХ. С помощью уравнения (1.8.14) можно учесть перемещения и повороты координатных систем эквивалентной схемы, вызванные действующими факторами. Учет факторов, порождающих погрешности обработки. Для учета влияния действующих факторов на погрешность обработки вначале необходимо ввести в полученное уравнение движения (1.8.14) перемещения опорных точек.
|
|
© 2003 - 2024 Prom Izhora
При копировании текстов приветствуется обратная ссылка |